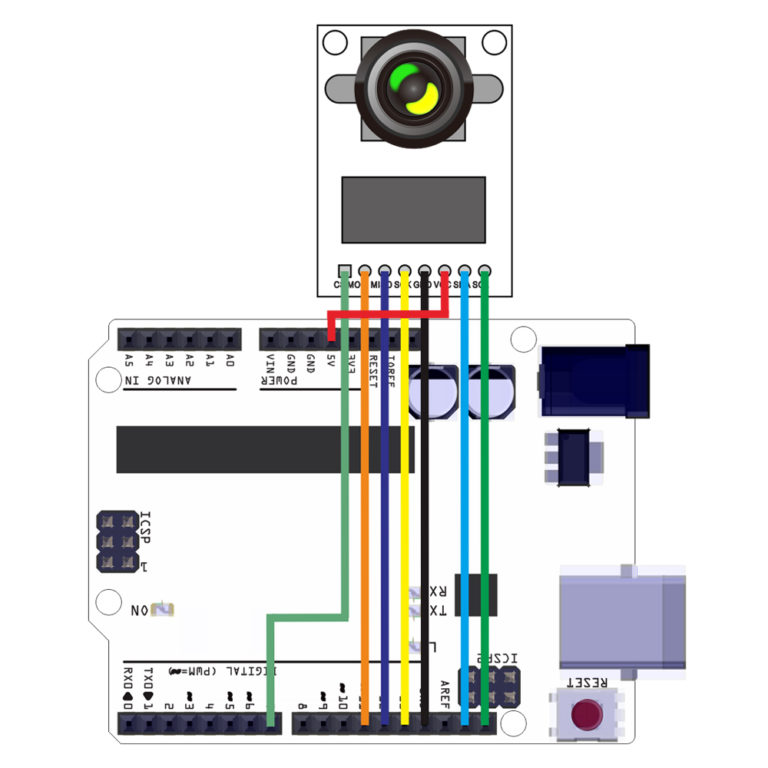
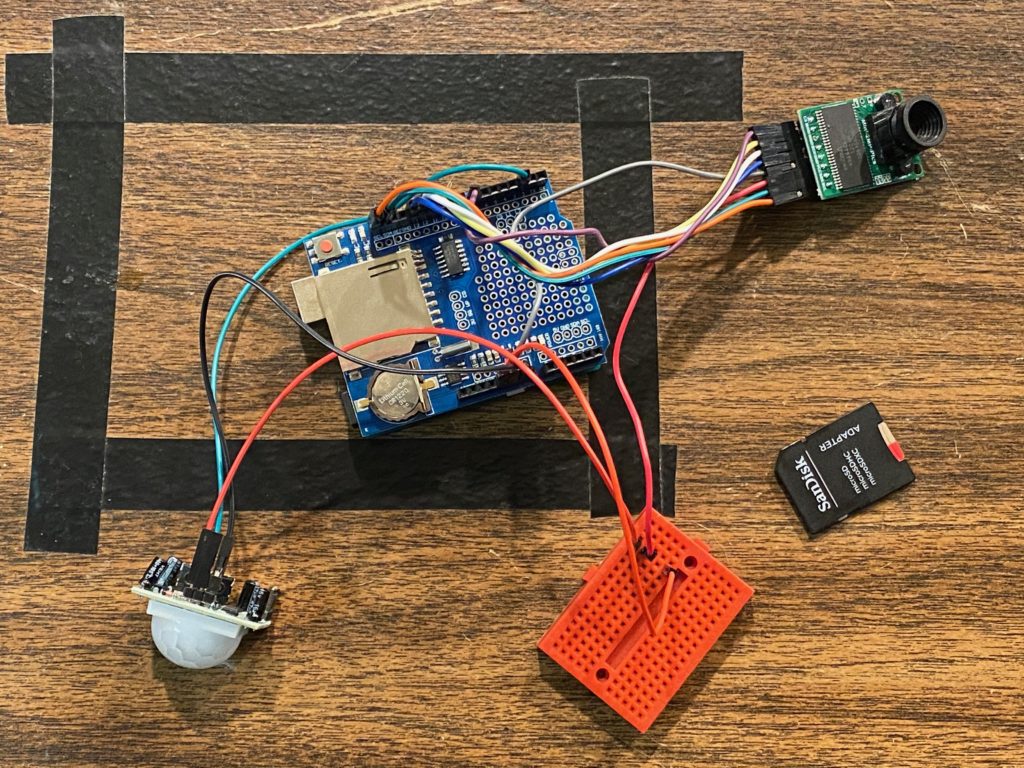
This project uses a PIR to trigger the ArduCam to record a video file and store it as an .AVI on the SD Card. It names the video file based on a random number generation function. on non-windows systems you can use VLC to ply the video files.
Notes:
- ArduCam is quirky with writing to the SD card fro this project. In my experiments I had numerous failures in trying to create a corresponding text log files as I did in the jpeg version of this project.
- For real world projects like this I would recommend something like the Raspberry Pi.
Prerequisite Classes:
Library
- ArduCam Library – https://github.com/ArduCAM/Arduino
- DS3231 Library – http://www.rinkydinkelectronics.com/library.php?id=73
Links
- ArduCAM Mini Cameras Tutorial – https://www.arducam.com/knowledge-base/mini-tutorial/
Functional Parts in the Project:
- Arduino Uno – https://store.arduino.cc/usa/arduino-uno-rev3
- ArduCam 2MP Mini Module – https://amzn.to/3c7ydGT
- Data Recorder Shield with RTC – https://amzn.to/3c6kNuP
- CR1220 Batteries – https://amzn.to/2X6h4ch
- PIR Sensor (HC-SR501) – https://amzn.to/2Yv3Lnu
//This is a modification of ArduCAM_Mini_Video2SD Example
#include <stdint.h>
#include <Wire.h>
#include <ArduCAM.h>
#include <SPI.h>
#include <SD.h>
#include "memorysaver.h"
//ETCG Notes -- PIR Sensor
#define pirPin 2
int pirReading;
// DEFINES
//This demo can only work on OV2640_MINI_2MP or OV5642_MINI_5MP or OV5642_MINI_5MP_BIT_ROTATION_FIXED platform.
#if !(defined OV5642_MINI_5MP || defined OV5642_MINI_5MP_BIT_ROTATION_FIXED|| defined OV2640_MINI_2MP_PLUS || defined OV2640_MINI_2MP|| defined OV3640_MINI_3MP)
#error Please select the hardware platform and camera module in the ../libraries/ArduCAM/memorysaver.h file
#endif
//#define FISHINO_UNO // Nice UNO board with integrated RTC, microSD, WiFi
#define SERIAL_SPEED 115200
#define BUFFSIZE 512 // 512 is a good buffer size for SD writing. 4096 would be better, on boards with enough RAM (not Arduino Uno of course)
#define FRAME_SIZE OV2640_320x240
#define WIDTH_1 0x40 // Video width in pixel, hex. Here we set 320 (Big Endian: 320 = 0x01 0x40 -> 0x40 0x01). For 640: 0x80
#define WIDTH_2 0x01 // For 640: 0x02
#define HEIGHT_1 0xF0 // 240 pixels height (0x00 0xF0 -> 0xF0 0x00). For 480: 0xE0
#define HEIGHT_2 0x00 // For 480: 0x01
#define FPS 0x0F // 15 FPS. Placeholder: will be overwritten at runtime based upon real FPS attained
#define TOTAL_FRAMES 200 // Number of frames to be recorded. If < 256, easier to recognize in header (for manual hex debug)
//set pin 7 as the slave select for SPI:
#define SPI_CS 7
//ETCG Notes -- SD Pin
#define SD_CS 10 // 9 on Arducam adapter Uno and SD shields
#ifdef FISHINO_UNO
#define SD_AUX 10 // Needs to be Output on Fishino Uno for the integrated SD card to work
#endif
#define AVIOFFSET 240 // AVI main header length
//#define DISABLE_SD
// GLOBALS
unsigned long movi_size = 0;
unsigned long jpeg_size = 0;
const char zero_buf[4] = {0x00, 0x00, 0x00, 0x00};
const int avi_header[AVIOFFSET] PROGMEM = {
0x52, 0x49, 0x46, 0x46, 0xD8, 0x01, 0x0E, 0x00, 0x41, 0x56, 0x49, 0x20, 0x4C, 0x49, 0x53, 0x54,
0xD0, 0x00, 0x00, 0x00, 0x68, 0x64, 0x72, 0x6C, 0x61, 0x76, 0x69, 0x68, 0x38, 0x00, 0x00, 0x00,
0xA0, 0x86, 0x01, 0x00, 0x80, 0x66, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00,
0x64, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
WIDTH_1, WIDTH_2, 0x00, 0x00, HEIGHT_1, HEIGHT_2, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x4C, 0x49, 0x53, 0x54, 0x84, 0x00, 0x00, 0x00,
0x73, 0x74, 0x72, 0x6C, 0x73, 0x74, 0x72, 0x68, 0x30, 0x00, 0x00, 0x00, 0x76, 0x69, 0x64, 0x73,
0x4D, 0x4A, 0x50, 0x47, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x01, 0x00, 0x00, 0x00, FPS, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0A, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x73, 0x74, 0x72, 0x66,
0x28, 0x00, 0x00, 0x00, 0x28, 0x00, 0x00, 0x00, WIDTH_1, WIDTH_2, 0x00, 0x00, HEIGHT_1, HEIGHT_2, 0x00, 0x00,
0x01, 0x00, 0x18, 0x00, 0x4D, 0x4A, 0x50, 0x47, 0x00, 0x84, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x4C, 0x49, 0x53, 0x54,
0x10, 0x00, 0x00, 0x00, 0x6F, 0x64, 0x6D, 0x6C, 0x64, 0x6D, 0x6C, 0x68, 0x04, 0x00, 0x00, 0x00,
0x64, 0x00, 0x00, 0x00, 0x4C, 0x49, 0x53, 0x54, 0x00, 0x01, 0x0E, 0x00, 0x6D, 0x6F, 0x76, 0x69,
};
#if defined (OV2640_MINI_2MP)||defined (OV2640_MINI_2MP_PLUS)
ArduCAM myCAM( OV2640, SPI_CS );
#elif defined (OV3640_MINI_3MP)
ArduCAM myCAM( OV3640, SPI_CS );
#else
ArduCAM myCAM( OV5642, SPI_CS );
#endif
// END GLOBALS
static void inline print_quartet(unsigned long i, File fd)
{ // Writes an uint32_t in Big Endian at current file position
fd.write(i % 0x100); i = i >> 8; //i /= 0x100;
fd.write(i % 0x100); i = i >> 8; //i /= 0x100;
fd.write(i % 0x100); i = i >> 8; //i /= 0x100;
fd.write(i % 0x100);
}
static void Video2SD()
{ // We don't enforce FPS: we just record and save frames as fast as possible
// Then we compute the attained FPS and update the AVI header accordingly
char str[8];
uint16_t n;
File outFile;
byte buf[BUFFSIZE];
static int i = 0;
uint8_t temp = 0, temp_last = 0;
unsigned long fileposition = 0;
uint16_t frame_cnt = 0;
uint16_t remnant = 0;
uint32_t length = 0;
uint32_t startms;
uint32_t elapsedms;
uint32_t uVideoLen = 0;
bool is_header = false;
#ifndef DISABLE_SD
//ETCG Notes -- Create File Name
// Create a avi file. Name should be unique-ish, but short
digitalWrite(SD_CS, HIGH);
randomSeed(analogRead(0) * millis());
n = (random(2, 999)); // Don't use 1.avi: was the default in old code, we don't want to overwrite old recordings
itoa(n, str, 10);
strcat(str, ".avi");
//Open the new file
outFile = SD.open(str, O_WRITE | O_CREAT | O_TRUNC);
if (! outFile)
{
Serial.println(F("File open failed"));
while (1);
return;
}
#endif
//Write AVI Main Header
// Some entries will be overwritten later
for ( i = 0; i < AVIOFFSET; i++)
{
char ch = pgm_read_byte(&avi_header[i]);
buf[i] = ch;
}
#ifndef DISABLE_SD
outFile.write(buf, AVIOFFSET);
#endif
Serial.print(F("\nRecording "));
Serial.print(TOTAL_FRAMES);
Serial.println(F(" video frames: please wait...\n"));
startms = millis();
//Write video data, frame by frame
for ( frame_cnt = 0; frame_cnt < TOTAL_FRAMES; frame_cnt++)
{
#if defined (ESP8266)
yield();
#endif
temp_last = 0; temp = 0;
//Capture a frame
//Flush the FIFO
myCAM.flush_fifo();
//Clear the capture done flag
myCAM.clear_fifo_flag();
//Start capture
myCAM.start_capture();
// Wait for frame ready
while (!myCAM.get_bit(ARDUCHIP_TRIG , CAP_DONE_MASK));
length = myCAM.read_fifo_length(); // Length of FIFO buffer. In general, it contains more than 1 JPEG frame;
// so we'll have to check JPEG markers to save a single JPEG frame
#if defined(SPI_HAS_TRANSACTION)
SPI.beginTransaction(SPISettings(8000000, MSBFIRST, SPI_MODE0));
#endif
#ifndef DISABLE_SD
// Write segment. We store 1 frame for each segment (video chunk)
outFile.write("00dc"); // "start of video data chunk" (00 = data stream #0, d = video, c = "compressed")
outFile.write(zero_buf, 4); // Placeholder for actual JPEG frame size, to be overwritten later
#endif
i = 0;
jpeg_size = 0;
// Deassert camera Chip Select to start SPI transfer
myCAM.CS_LOW();
// Set FIFO to burst read mode
myCAM.set_fifo_burst();
// Transfer data, a byte at a time
while ( length-- )
{ // For every byte in the FIFO...
#if defined (ESP8266)
yield();
#endif
// We always need the last 2 bytes, to check for JPEG begin/end markers
temp_last = temp; // Save current temp value
temp = SPI.transfer(0x00); // Overwrite temp with 1 byte from FIFO (0x00 is dummy byte for the slave: we are reading, the slave will ignore it)
#if defined(SPI_HAS_TRANSACTION)
SPI.endTransaction();
#endif
// a JPEG ends with the two bytes 0xFF, 0xD9
if ( (temp == 0xD9) && (temp_last == 0xFF) ) // End of the image
{
buf[i++] = temp; // Add this last byte to the buffer
myCAM.CS_HIGH(); // End of transfer: re-assert Slave Select
#ifndef DISABLE_SD
// Write the buffer to file
outFile.write(buf, i);
#endif
is_header = false; // We are at the last byte of the JPEG: sure is not the header :)
jpeg_size += i; // Update total jpeg size with this last buffer size
i = 0; // Reset byte counter (restart writing from the first element of the buffer)
}
if (is_header == true) // Not at end of JPEG, yet
{
//Write image data to buffer if not full
if (i < BUFFSIZE)
buf[i++] = temp;
else
{ // Buffer is full: transfer to file
myCAM.CS_HIGH(); // End SPI transfer
#ifndef DISABLE_SD
//Write BUFFSIZE bytes image data to file
outFile.write(buf, BUFFSIZE);
#endif
i = 0; // Restart writing from the first element
buf[i++] = temp; // Save current byte as first in "new" buffer
myCAM.CS_LOW(); // Re-enable SPI transfer
myCAM.set_fifo_burst(); // Set FIFO to burst read mode
jpeg_size += BUFFSIZE;
}
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{ // A JPEG starts with the two bytes 0xFF, 0XD8; so here we are at the beginning of the JPEG
is_header = true;
buf[i++] = temp_last; // Save the first two bytes (off-cycle)
buf[i++] = temp;
}
} // end loop over each byte in the FIFO: JPEG is complete
// Padding
remnant = jpeg_size & 0x00000001; // Align to 16 bit: add 0 or 1 "0x00" bytes
#ifndef DISABLE_SD
if (remnant > 0)
{
outFile.write(zero_buf, remnant); // see https://docs.microsoft.com/en-us/windows/desktop/directshow/avi-riff-file-reference
}
#endif
movi_size += jpeg_size; // Update totals
uVideoLen += jpeg_size; // <- This is for statistics only
// Now we have the real frame size in bytes. Time to overwrite the placeholder
#ifndef DISABLE_SD
fileposition = outFile.position(); // Here, we are at end of chunk (after padding)
outFile.seek(fileposition - jpeg_size - remnant - 4); // Here we are the the 4-bytes blank placeholder
print_quartet(jpeg_size, outFile); // Overwrite placeholder with actual frame size (without padding)
outFile.seek(fileposition - jpeg_size - remnant + 2); // Here is the FOURCC "JFIF" (JPEG header)
outFile.write("AVI1", 4); // Overwrite "JFIF" (still images) with more appropriate "AVI1"
// Return to end of JPEG, ready for next chunk
outFile.seek(fileposition);
#endif
} // End cycle for all frames
// END CAPTURE
// Compute statistics
elapsedms = millis() - startms;
float fRealFPS = (1000.0f * (float)frame_cnt) / ((float)elapsedms);
float fmicroseconds_per_frame = 1000000.0f / fRealFPS;
uint8_t iAttainedFPS = round(fRealFPS); // Will overwrite AVI header placeholder
uint32_t us_per_frame = round(fmicroseconds_per_frame); // Will overwrite AVI header placeholder
#ifndef DISABLE_SD
//Modify the MJPEG header from the beginning of the file, overwriting various placeholders
outFile.seek(4);
print_quartet(movi_size + 12 * frame_cnt + 4, outFile); // riff file size
//overwrite hdrl
//hdrl.avih.us_per_frame:
outFile.seek(0x20);
print_quartet(us_per_frame, outFile);
unsigned long max_bytes_per_sec = movi_size * iAttainedFPS / frame_cnt; //hdrl.avih.max_bytes_per_sec
outFile.seek(0x24);
print_quartet(max_bytes_per_sec, outFile);
//hdrl.avih.tot_frames
outFile.seek(0x30);
print_quartet(frame_cnt, outFile);
outFile.seek(0x84);
print_quartet((int)iAttainedFPS, outFile);
//hdrl.strl.list_odml.frames
outFile.seek(0xe0);
print_quartet(frame_cnt, outFile);
outFile.seek(0xe8);
print_quartet(movi_size, outFile);// size again
myCAM.CS_HIGH();
//Close the file
outFile.close();
#endif
Serial.println(F("\n*** Video recorded and saved ***\n"));
Serial.print(F("Recorded "));
Serial.print(elapsedms / 1000);
Serial.print(F("s in "));
Serial.print(frame_cnt);
Serial.print(F(" frames\nFile size is "));
Serial.print(movi_size + 12 * frame_cnt + 4);
Serial.print(F(" bytes\nActual FPS is "));
Serial.print(fRealFPS, 2);
Serial.print(F("\nMax data rate is "));
Serial.print(max_bytes_per_sec);
Serial.print(F(" byte/s\nFrame duration is "));
Serial.print(us_per_frame);
Serial.println(F(" us"));
Serial.print(F("Average frame length is "));
Serial.print(uVideoLen / TOTAL_FRAMES);
Serial.println(F(" bytes"));
}
////////////
//
// SETUP
//
////////////
void setup()
{
//ETCG Note -- PIR Sensor
pinMode(pirPin, INPUT);
uint8_t vid, pid;
uint8_t temp;
Wire.begin();
Serial.begin(SERIAL_SPEED);
while (!Serial);
delay(200);
Serial.println(F("ArduCAM Start!\n"));
delay(5000); // Gain time to start logic analyzer
#ifndef DISABLE_SD
// set the SPI_CS as an output:
pinMode(SD_CS, OUTPUT);
digitalWrite(SD_CS, HIGH);
#ifdef FISHINO_UNO
pinMode(SD_AUX, OUTPUT);
#endif
#endif
delay(1000);
// initialize SPI:
SPI.begin();
#ifndef DISABLE_SD
//Initialize SD Card
while (!SD.begin(SD_CS)) {
Serial.println(F("SD Card Error!")); delay(1000);
}
Serial.println(F("SD Card detected."));
delay(200);
#endif
//Reset the CPLD
myCAM.write_reg(0x07, 0x80);
delay(100);
myCAM.write_reg(0x07, 0x00);
delay(200);
while (1) {
//Check if the ArduCAM SPI bus is OK
myCAM.write_reg(ARDUCHIP_TEST1, 0x55);
temp = myCAM.read_reg(ARDUCHIP_TEST1);
if (temp != 0x55)
{
Serial.println(F("SPI interface Error!"));
delay(1000); continue;
} else {
Serial.println(F("SPI interface OK.")); break;
}
}
delay(100);
#if defined (OV2640_MINI_2MP)||defined (OV2640_MINI_2MP_PLUS)
while (1)
{
//Check if the camera module type is OV2640
myCAM.wrSensorReg8_8(0xff, 0x01);
myCAM.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid);
myCAM.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid);
if ((vid != 0x26 ) && (( pid != 0x41 ) || ( pid != 0x42 )))
{
Serial.println(F("Can't find OV2640 module!"));
delay(1000); continue;
}
else {
Serial.println(F("OV2640 detected.")); break;
}
}
#elif defined (OV3640_MINI_3MP)
while (1) {
//Check if the camera module type is OV3640
myCAM.rdSensorReg16_8(OV3640_CHIPID_HIGH, &vid);
myCAM.rdSensorReg16_8(OV3640_CHIPID_LOW, &pid);
if ((vid != 0x36) || (pid != 0x4C)) {
Serial.println(F("Can't find OV3640 module!"));
delay(1000); continue;
} else {
Serial.println(F("OV3640 detected.")); break;
}
}
#else
while (1) {
//Check if the camera module type is OV5642
myCAM.wrSensorReg16_8(0xff, 0x01);
myCAM.rdSensorReg16_8(OV5642_CHIPID_HIGH, &vid);
myCAM.rdSensorReg16_8(OV5642_CHIPID_LOW, &pid);
if ((vid != 0x56) || (pid != 0x42)) {
Serial.println(F("Can't find OV5642 module!"));
delay(1000); continue;
}
else {
Serial.println(F("OV5642 detected.")); break;
}
}
#endif
delay(1000);
myCAM.set_format(JPEG);
myCAM.InitCAM();
#if defined (OV2640_MINI_2MP)||defined (OV2640_MINI_2MP_PLUS)
myCAM.OV2640_set_JPEG_size(FRAME_SIZE);
#elif defined (OV3640_MINI_3MP)
myCAM.OV3640_set_JPEG_size(OV3640_320x240);
#else
myCAM.write_reg(ARDUCHIP_TIM, VSYNC_LEVEL_MASK); //VSYNC is active HIGH
myCAM.OV5642_set_JPEG_size(OV5642_320x240);
#endif
}
void loop() {
//ETCG Notes -- Motion Sensor Trigger
pirReading = digitalRead(pirPin);
if (pirReading == HIGH) {
Serial.println("Motion Detected");
Video2SD();
delay(1000);
} else {
Serial.println("No Motion Detected");
}
}
Be the first to comment